Sai Aneesh SuryadevaraHello! I'm Aneesh, a Machine Learning Engineer at Nuro, where I work on the behavior team for autonomous driving. I graduated from UC San Diego with an MS in ECE, specializing in Intelligent Systems, Robotics, and Control (ISRC). I completed my undergraduate from the Indian Institute of Technology Bombay, receiving an Honours degree in Mechanical Engineering and a Minor degree in Artificial Intelligence and Data Science. My work spans areas like Reinforcement Learning and Robotics, and I've also explored 3D Computer Vision, NeRF, and Language Alignment for open-world mobile manipulation. During my time at UC San Diego, I was a researcher at the Contextual Robotics Institute, working with Prof. Xiaolong Wang. For my undergraduate thesis, I worked on Deep Reinforcement Learning for the Control of Soft Continuum robots advised by Prof. Abhishek Gupta and Prof. Shivaram Kalyanakrishnan. I love diving deep into fundamentals and am always curious about the application of these fields in the real world—right now this happens to be in autonomous driving! Research Interests: Robot Learning, 3D Computer Vision, Embodied AI Email / GitHub / Resume / Google Scholar / LinkedIn |
|

ML Engineer Apr '25 - Present |

Autonomy Intern Jul '24 - Dec '24 |

M.S. in ECE Sep '23 - Mar '25 |

B.Tech in Mech. Jul '19 - May '23 |
News
- Apr 2025: Joining Nuro as an ML Engineer with the Prediction Team!
- Mar 2025: Graduated from UC San Diego with MS in ECE (Intelligent Systems, Robotics, and Control)
- July 2024: Interning at May Mobility, working on the decision-making team for the autonomous vehicle.
- Oct 2023: Started working as Graduate Researcher, advised by Prof. Xiaolong Wang.
- Sep 2023: Excited to start my graduate studies at UC San Diego!
- Aug 2023: Our paper on RL for Surgical Robots has been accepted to IEEE-RAL!
- May 2023: Graduated from IIT Bombay.
- May 2022: Will be joining the MEDCVR lab at the University of Toronto, as a Mitacs Research Intern.
Publications
|
WildLMA: Long Horizon Loco-MAnipulation in the WildRi-Zhao Qiu*, Yuchen Song*, Xuanbin Peng*, Sai Aneesh Suryadevara, et al., Xiaolong Wang IEEE International Conference on Robotics and Automation (ICRA) 2025 Paper | Webpage | BibTeX Long horizon loco-manipulation with LLM planner and wholebody imitation learning skill sets |

|
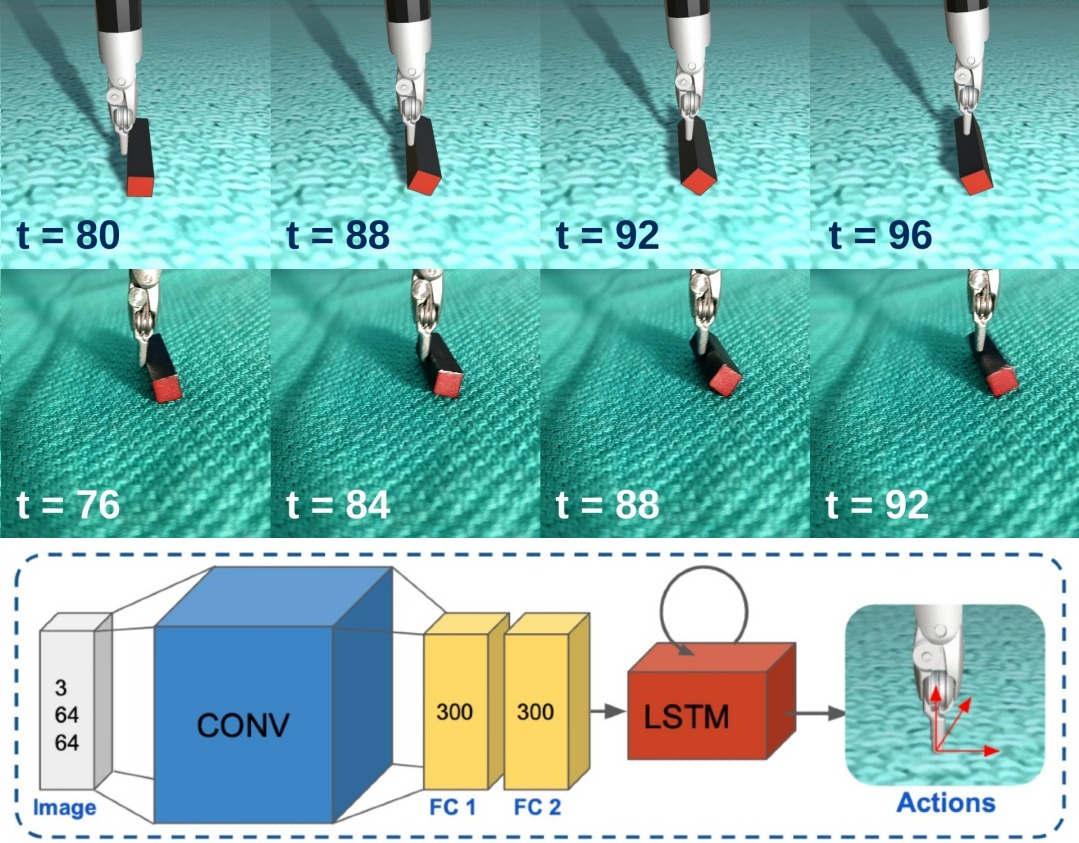
Learning Nonprehensile Dynamic Manipulation: Sim2real Vision-based Policy with a Surgical RobotRadian Gondokaryono, Mustafa Haiderbhai, Sai Aneesh Suryadevara, Lueder Alexander Kahrs IEEE Robotics and Automation Letters (RA-L) 2023 Paper | Webpage | Video | BibTeX |
Research
|
Bachelor's Thesis: Control of Continuum Robots Using Deep Reinforcement LearningGuides: Prof. Abhishek Gupta and Prof. Shivaram Kalyanakrishnan [Code] Implemented a model-free reinforcement learning approach to train control policies for trajectory tracking of a soft continuum robot arm. Developed a custom OpenAI Gym environment and integrated it with VEGA FEM C++ middleware library and ROS to simulate more realistic dynamics. |
|
Decentralized Multi-Agent Patrolling using Q-LearningGuides: Prof. Arpita Sinha and Prof. Leena Vachhani [Code] In this work, we wish to find an optimal patrolling strategy in a multi-agent setting with the constraint of minimum information sharing. Developed patrolling techniques and analyzed their performance using ROS, TraCI and SUMO simulator |
Key Technical Projects
|
Flipkart National Competition: Autonomous package delivery botsIITB Team Lead, National Semi-Finalists [Code] Developed a system of mobile bots capable of autonomous package sorting using ROS and OpenCV framework, tracking each bot’s pose through ArUco markers. |
|
e -Yantra Robotics Competition: Autonomous Delivery Drone System[Code] Simulated a working prototype of an autonomous drone in Gazebo for package delivery during Covid-19. Designed attitude and position (PID) controllers in ROS and implemented A* algorithm for path planning and obstacle avoidance. |

|
Image-to-Image Translation using CycleGAN and DiscoGANGNR638: Deep Learning and Pattern Recognition for Computer Vision [Code] Implemented and compared the image generation capabilities of GANs and VAEs in PyTorch. Also investigated the performance of DiscoGAN and CycleGAN architectures for style transfer between Pansy and Tigerlily. |
|
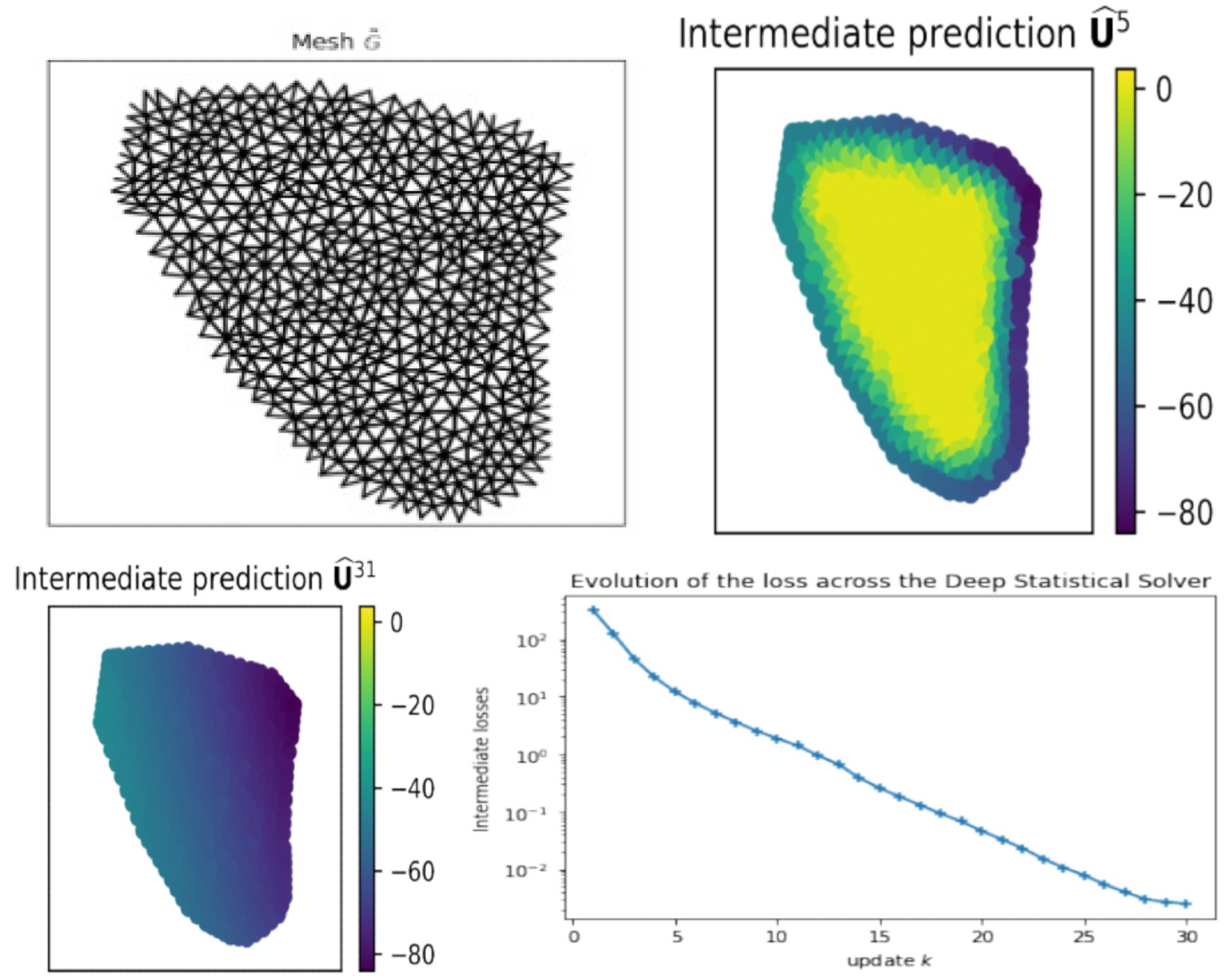
Statistical Solvers using Graph Neural NetworksIE643: Deep Learning Theory and Practice [Code] Worked on a paper implementation to understand Deep Graph Neural Networks as a new class of solvers for permutation-invariant optimization problems that can be trained without a training set of sample solutions |

|
Self Driving Car, University of TorontoMOOC, Coursera [Code] Built an environment perception stack, using a Semantic Segmentation neural network for lane estimation and object detection to alert the car about the position and category of obstacles |